Detectie voor verkeersafhankelijke regelingen
Voertuigafhankelijke regelingen zijn vandaag standaard op 99% van de kruispunten langs gewestwegen in Vlaanderen. Ze gebruiken detectie om het verkeer zo goed mogelijk in kaart te brengen en op basis daarvan de lichtenregelingen aan te passen. Het Agentschap Wegen en Verkeer (AWV) legde een standaardconfiguratie vast voor een optimaal resultaat.
Voertuigafhankelijke regelingen hebben informatie nodig om zich te kunnen aanpassen aan de hoeveelheid verkeer die zich aandient. Deze informatie wordt aangeleverd door detectoren op het kruispunt. Er bestaan verschillende soorten detectie (zie kader). In de meeste gevallen wordt de inductieve lus gebruikt voor detectie van autoverkeer en de drukknop voor detectie van fietsers en voetgangers. Soms kunnen de omstandigheden een ander detectiemiddel vragen, of is er een combinatie nodig van verschillende registratievormen.
Nieuwe standaardconfiguratie
Het AWV werkte in het kader van het actieplan rond verkeerslichten een standaardconfiguratie uit voor detectie. Die wordt op alle nieuwe kruispunten of op kruispunten met grondige infrastructuurwerken toegepast. Een van de basisprincipes is dat er steeds detectielussen aangelegd worden op elke rijstrook. De nieuwe standaardconfiguratie bestaat uit een detectielus vlak voor het kruispunt op 3 à 5 meter, een detectielus op 30 à 50 meter voor het kruispunt en een optionele veraf-lus op 60 à 100 meter voor de stopstreep (zie tekening).
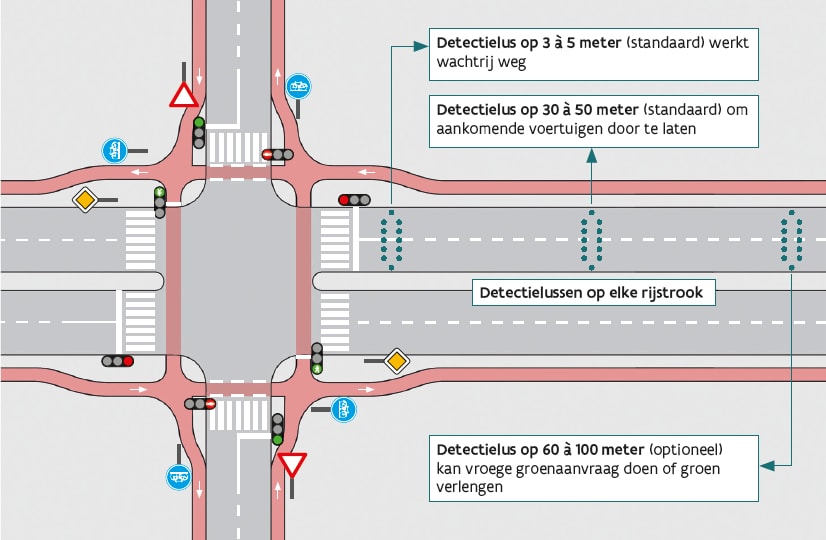 Standaardconfiguratie voor detectie aan voertuigafhankelijke verkeerslichtengeregelde kruispunten
Standaardconfiguratie voor detectie aan voertuigafhankelijke verkeerslichtengeregelde kruispunten
Voordelen
- Door de detectie uit te breiden, kan de verkeerslichtenregeling sterk verfijnd worden. Vroeger was de minimale groentijd standaard vastgelegd tussen 10 tot 22 seconden. Dankzij een betere detectie kan de minimale groentijd nu verlaagd worden tot ongeveer 5 seconden. Het systeem wordt dus dynamischer. Bepaalde fasen die niet nuttig zijn, kunnen zelfs overgeslagen worden.
- Met de uitgebreidere detectie kan het systeem ook beter bepalen welke richtingen groen moeten krijgen en welke niet.
- Een ander bijkomend voordeel is dat bij een defect de functie opgevangen kan worden door de andere detectoren. Een defecte detector kan immers grote gevolgen hebben voor de verkeerslichtenregeling. Met dit nieuwe systeem blijft die impact beperkter.
- Tot slot bekijkt het AWV ook hoe de gegevens van de detectie in de toekomst gebruikt kunnen worden als tellingen voor een permanente waarneming en als input voor de opmaak of aanpassing van de lichtenregelingen.
Soorten detectiesystemen
- Een inductieve lus is een metaaldetector die in het wegdek wordt ingeslepen. Als een metalen object (een voertuig) passeert, weet het systeem of er een voertuig aanwezig is.
- Een speciaal type is de selectieve lus, die niet alleen de aanwezigheid van een voertuig detecteert maar ook gegevens van dat voertuig kan ontvangen. Deze selectieve lussen worden gebruikt om naderend openbaar vervoer op grote afstand te detecteren en om te weten welk lijnnummer het voertuig heeft om zo de juiste rechtdoor- of afslagrichting zo snel mogelijk groen te geven. Dit groen wordt vervolgens verlengd totdat het voertuig voorbij de stopstreep over een andere selectieve lus rijdt.
- Met een drukknop kunnen voetgangers en fietsers zich registreren.
- Een radar detecteert beweging aan de hand van uitgezonden radargolven, die gereflecteerd worden door motorvoertuigen, fietsers of voetgangers. Door een specifiek doelbereik te selecteren zal de radar een bepaald oppervlak van de weg continu bekijken. Deze vorm van detectie is goedkoper, maar kan soms minder goed detecteren.
- Bij cameradetectie gebeurt de detectie op basis van beeldverwerkingssoftware. Voordeel van deze detectievorm is dat het systeem niet in de grond moet ingeslepen worden. Nadeel is wel dat zon en schaduw de detectie kunnen beïnvloeden. Cameradetectie wordt soms als aanvullende vorm van detectie gebruikt, bijvoorbeeld bij een inductieve lus die motorrijders of hogere voertuigen niet altijd goed detecteert.
- Het AWV doet momenteel ook enkele proefprojecten met thermische camera’s die weggebruikers detecteren. Hun betrouwbaarheid en effectiviteit wordt geëvalueerd, maar voorlopig wordt deze detectievorm nog niet op grote schaal toegepast.